保护功能(错误代码)
驱动器具有各种保护功能。
保护功能动作时依照P.7-61资料篇「时序图」(异常发生时)停止电机并显示错误状态,关闭(开路)伺服警报输出(ALM)。
错误状态和处理
在错误状态时,前面板LED显示错误代码No.,伺服使能开启无法执行。
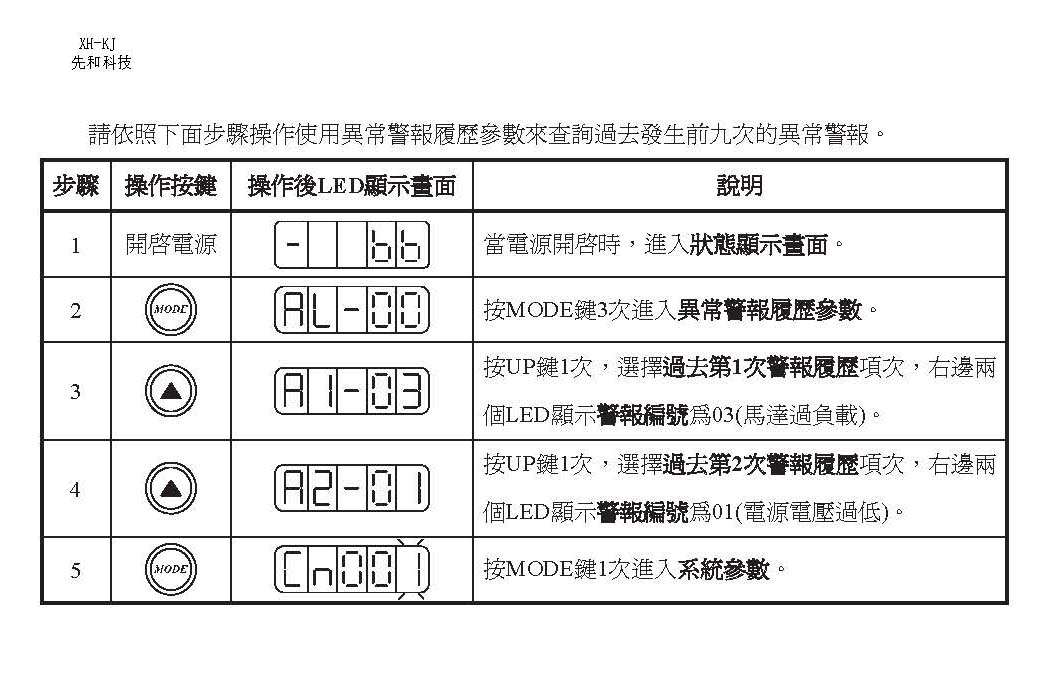
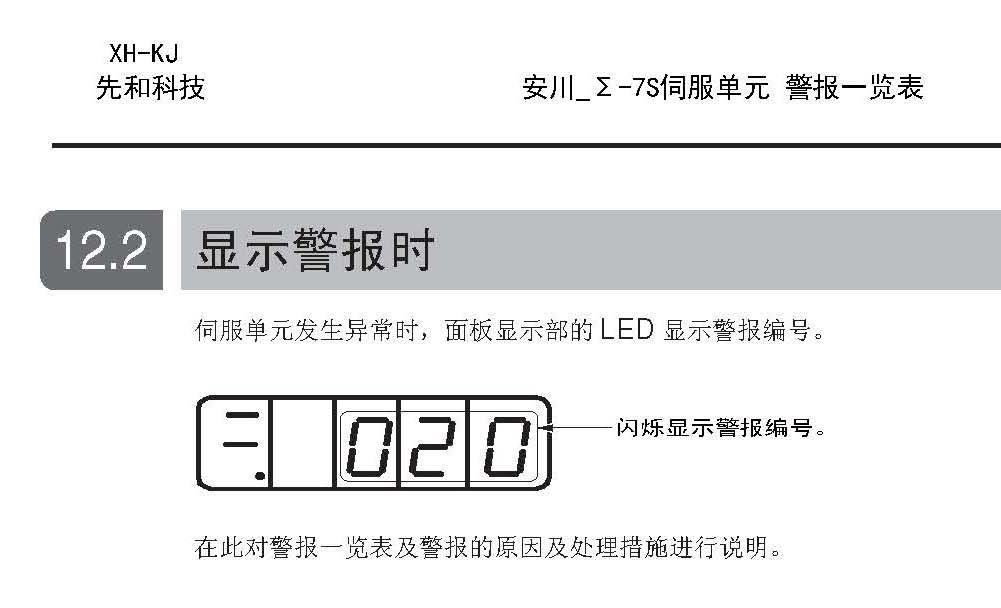
报警显示
错误代码的主代码和辅助代码(+左边圆点)用10进制相互交错灯亮灯灭。
(过载保护示例)
可用RTEX通信或USB通信清除错误状态。(仅对应属性/可清除)
过载保护(过负载保护)动作时,可在发生警报约10秒后清除。用RTEX通信清除警报时,
接收清除指令,进入可清除状态后进行清除处理。另外,驱动器的控制电源L1C、L2C之
间关闭时,可清除过载保护时限特性(参照P.6-19)。
请在解除异常原因,确保安全后,电机停止状态下进行警告清除。
넶245
18-11-26